发布日期:2026-04-12 07:48 点击次数:161
当咱们看到一个机器东谈主踉跄地走向桌子,却撞到了明明在那里的椅子时,你是否会趣味:为什么机器东谈主的"眼睛"这样不灵光?这个看似浅显的问题,现实上涉及了东谈主工智能领域最中枢的挑战之一。最近,韩国国防发展署的征询团队在2026年3月发表的一项征询中,为咱们揭开了这个谜题,并建议了一个令东谈主目前一亮的处置决议。
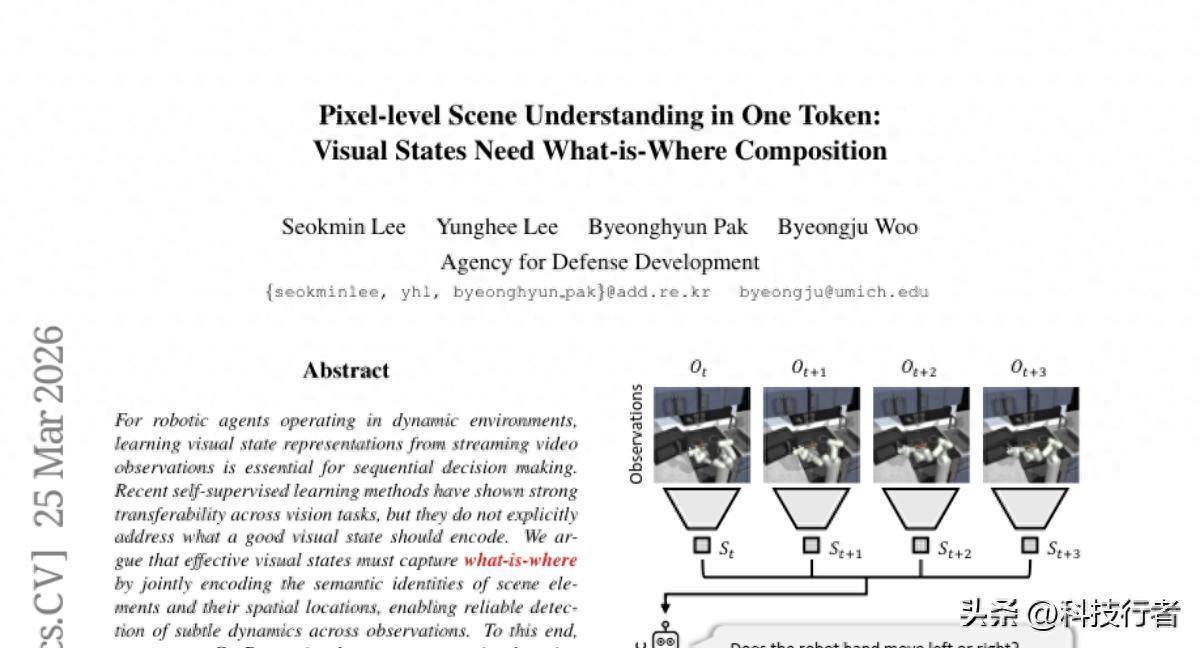
这项征询发表在闻明的策划机视觉期刊上,论文编号为arXiv:2603.13904v2,为机器东谈主视觉聚会开辟了全新谈路。征询团队发现,传统机器东谈主之是以普通"看错",根柢原因在于它们吞吐一种关键才智:同期聚会"什么在何处"。就像一个近视眼的东谈主戴着分歧适的眼镜,能看到依稀的轮廓,却分辨不清具体是什么东西在什么位置。
征询团队开发了一个名为CroBo的改革系统,这个名字开首于"Crop"(剪辑)和"Bottleneck"(瓶颈)的组合。这个系统的使命旨趣就像西席一个探员,让它只是通过不雅察作歹现场的一小块区域,就能准确推断出通盘现场的布局和细节。通过这种特有的西席花样,CroBo学会了将复杂的视觉场景压缩成一个包含丰富信息的"超等挂牵体",这个挂牵体不仅知谈场景中有什么物体,还精确纪录着每个物体的位置和它们之间的关系。
更令东谈主爽直的是,这项征询在多个机器东谈主任务中取得了冲破性效用。从厨房操作到行走扬弃,CroBo都展现出了前所未有的精确性。征询团队通过多数实考据明,这种新挨次让机器东谈主大致像东谈主类一样,不仅看得见,还能看得懂、牢记住。
一、机器东谈主的视觉窘境:为什么"看见"不即是"聚会"
当咱们走进一个房间时,大脑会自动完成一项复杂的任务:不仅识别出房间里的每一件物品,还能精确记着它们的位置关系。咱们知谈沙发在电视前边,茶几在沙发傍边,遥控器可能掉在了沙发缝里。这种才智对东谈主类来说如斯当然,以至于咱们很少意志到它的复杂性。
机器东谈主靠近的挑战却截然有异。传统的机器东谈主视觉系统就像一个忘记的不雅察者,诚然大致识别物体,但很难准确记着它们的空间关系。当机器东谈主看到一个场景时,它可能知谈画面中有一把椅子、一张桌子和一个杯子,但却不阐明椅子是否被推到了桌子底下,杯子是放在桌子上照旧椅子上。这种依稀的聚会导致机器东谈主在奉行任务时普通出现令东谈主哭笑不得的无理。
征询团队通过深入分析发现,现存的自监督学习挨次诚然在图像分类和物体识别方面施展出色,但它们吞吐一个关键要素:对场景空间组成的精确聚会。这些挨次持续专注于识别"是什么",却忽略了"在何处"这个相同遑急的信息。就好比一个东谈主诚然剖析所有这个词的居品,却老是记不住居品的摆放位置,当然无法在昏黑中准确找到想要的东西。
这个问题在动态环境中变得愈加凸起。当物体在场景中出动时,机器东谈主不仅需要识别出动的物体是什么,还需要准确跟踪它们的位置变化。淌若吞吐对空间关系的精确聚会,机器东谈主就像一个散光严重的东谈主试图打乒乓球,诚然能看到球的存在,却无法准确判断球的轨迹和落点。
征询团队意志到,要让机器东谈主信得过"看懂"天下,就必须让它们学会同期掌持"什么是什么"和"什么在何处"这两个基本要素。这种聚会不行是分离的,而必须是交融的,就像咱们的大脑将物体识别和空间定位无缝整合在一皆。唯一这样,机器东谈主才能在复杂果真凿天下中作念出准确的判断和决策。
二、CroBo的玄机设计:用"窥探游戏"西席超等大脑
面对传统挨次的局限性,征询团队设计了一个极其玄机的西席计谋,这个计谋的中枢想想不错用一个风趣的游戏来聚会。设计你是一位教养丰富的探员,眼前放着一张完整的作歹现场相片。目前,有东谈主用黑布遮住了相片的大部分区域,只留住一小块不到十分之一的区域给你不雅察,然后条目你准确描绘出被遮住区域的全部细节。
这看似不可能的任务,恰是CroBo西席经过的中枢。系管辖先会完整不雅察一个场景,就像探员仔细征询完整的作歹现场一样,将所有这个词信息压缩存储在一个特殊的"挂牵瓶颈"中。这个挂牵瓶颈就像一个超等压缩包,诚然体积很小,却包含了通盘场景的精华信息。
接下来,系统靠近信得过的挑战:从这个完整场景中立时剪辑出一小块区域,然后东谈主为地遮掉其中百分之九十的内容,只保留百分之十的踪迹。这时,系统必须依靠之前存储在挂牵瓶颈中的全局信息,配合这少得爱怜的局部踪迹,准确重建出被遮掉的所有这个词细节。
这种西席花样的天才之处在于,它迫使系统必须在挂牵瓶颈中保存信得过有用的信息。淌若挂牵瓶颈只记着了物体的身份而忽略了位置信息,系统就无法准确重建局部细节。淌若挂牵瓶颈只记着了简短的空间布局而忽略了具体物体,重建相同会失败。唯一当挂牵瓶颈同期精确纪录了"什么物体在什么位置"这种抽象信息时,系统才能到手完成这个看似不可能的重建任务。
为了进一步提高西席效果,征询团队汲取了一个分享权重的孪生网罗结构。这就像让两个学生同期学习归并门课程,一个负责不雅察完整场景并酿周密局聚会,另一个负责从残破的局部信息中索取踪迹。通过让它们分享常识,系统大致更好地拓荒全局聚会和局部重建之间的关系。
西席经过中,系统欺压接受各式场景的熟习,恣意单的室内环境到复杂的户外场景,从静态的物体摆放到动态的交互经过。每一次西席都是一次"窥探游戏"的挑战,系统必须从有限的踪迹中推断出完整的真相。跟着西席的进行,系统的挂牵瓶颈渐渐变得愈加忠良,不仅大致准确识别物体,还能精确记着它们的空间关系和相互作用。
这种西席计谋的另一个玄机之处在于它的自符合性。系统不需要东谈主工标注的数据,统统依靠视觉信息本人进行学习。这就像让学生通过作念多数的推理题来提高逻辑想维才智,而不是浅显地背诵谜底。通过这种花样,CroBo学会了信得过聚会视觉场景的内在礼貌,而不是机械地挂牵特定的模式。
三、从实验室到现实:CroBo如何投降机器东谈主天下
征询团队为了考据CroBo的现实效果,设计了一系列严格的测试,这些测试就像给机器东谈主安排了各式"实习使命",恣意单的家务活到复杂的手段操作,全场地查考系统的才智。
率先,征询团队遴荐了Franka Kitchen这个经典的机器东谈主操作测试环境。这个环境模拟了一个确凿的厨房场景,机器东谈主需要完成开灯、转旋钮、开门等日常操作。关于东谈主类来说,这些当作再浅显不外,但对机器东谈主而言,每一个当作都需要精确的视觉聚会。比如开微波炉门时,机器东谈主必须准确识别门把手的位置,聚会门的开启标的,并互助手臂的畅通轨迹。
实验末端令东谈主昂然。在最具挑战性的开微波炉门任务中,CroBo的到手率达到了64.8%,比拟之前最好的挨次补助了13.6个百分点。这个补助看似不大,但在机器东谈主领域,每一个百分点的补助都代表着多数的时间冲破。更遑急的是,CroBo在开灯和转旋钮等需要精笃定位的任务中施展尤为出色,到手率折柳达到87.6%和65.6%,这标明系统照实掌持了"什么在何处"的关键才智。
征询团队还测试了CroBo在畅通扬弃方面的施展。在DeepMind扬弃套件中,系统需要扬弃造谣变装完成行走、耸立、够取物体等当作。这类任务对视觉聚会建议了不同的条目:系统不仅要识别设计物体,还要聚会肉体各部分的相对位置和畅通景色。CroBo在行走任务中取得了80.8%的到手率,在耸立均衡任务中达到了92.0%,这些收成都权臣超越了现存挨次。
为了更深入地聚会CroBo的使命旨趣,征询团队进行了一系列重建实验。他们让系统不雅察各式场景的相片,然后凭据极少的踪迹重建出完整的图像。末端自满,即使唯一百分之十的可见信息,CroBo也能准确重建出物体的姿色、情绪、材质和位置关系。
在一个极端风趣的实例中,系统不雅察了一个包含两个青色球体的浅显场景。当这两个球体在测试图像中统统被梗阻时,CroBo仅凭借极少的配景踪迹,就准确重建出了球体的位置和情绪。这标明系统的挂牵瓶颈不仅记着了"存在青色球体"这个事实,还精确保存了"球体在场景中的具体位置"这个空间信息。
征询团队还测试了系统的可推广性,使用了不同界限的神经网罗架构。令东谈主惊喜的是,即使是最小的ViT-S/16架构,CroBo的平均到手率也达到了65.0%,这个收成以致非凡了使用更大架构的传统挨次。这说明CroBo的上风开首于更好的学习计谋,而不是浅显的模子界限堆叠。当使用更大的ViT-L/16架构时,系统的平均到手率进一步补助到71.1%,比之前的最好挨次跳动7.8个百分点。
这些实验末端不仅考据了CroBo的时间上风,更遑急的是说明注解了"什么在何处"这种抽象聚会关于机器东谈主智能的遑急性。系统通过学会精确编码场景的空间语义组成,取得了在动态环境中可靠运转的才智。
四、透视CroBo的"慧眼":重建实验揭示的视觉奥秘
为了信得过聚会CroBo是如何"看懂"天下的,征询团队进行了一系列天际有天的重建实验。这些实验就像给系统作念"视力测试",但测试的不是看得清不阐明,而是聚会得深不潜入。
征询团队率先遴荐了CLEVR数据集,这是一个包含浅显几何体的合成场景荟萃。在这个看似浅显的环境中,CroBo展现出了惊东谈主的聚会才智。当系统面对一个包含不同情绪、姿色和材质物体的场景时,即使重配置计中的大部分区域被东谈主为梗阻,CroBo也能准确复原出每个物体的所有这个词属性。
最引东谈主详细的是一个包含两个青色球体的实例。在重建经过中,这两个球体在输入的残破图像中统统不可见,系统只可看到极少的配景信息。然而,CroBo不仅准确地在正确位置重建出了两个球体,还完好意思复原了它们的青色外不雅和球形姿色。这个末端令东谈主轰动,因为它标明系统的挂牵瓶颈不仅记着了"有青色球体存在"这个抽象信息,还精确保存了"两个球体折柳位于场景的具体位置"这种详备的空间布局信息。
在更复杂果真凿场景中,CroBo的施展相同出色。在DAVIS视频数据集的测试中,系统面对的是包含畅通物体的动态场景。一个典型的例子是海滩上的马匹场景,当输入的残破图像只自满马匹肉体的一小部分时,CroBo大致准确重建出完整的马匹形象,包括马的姿态、周围的沙滩环境,以致配景中依稀的东谈主影。这种重建才智自满系统不仅聚会了主要物体的形态,还掌持了通盘场景的空间端倪关系。
在MOSEv2数据蚁合,CroBo靠近着更大的挑战:多个物体同期存在且相互梗阻的复杂场景。在一个冰球比赛的场景中,画面包含多名球员、冰球、球门等无边元素,它们之间存在复杂的空间关系和梗阻情况。当系统只可不雅察到场景中很小的一块区域时,CroBo仍能准确推断出被梗阻区域中球员的位置、姿势和装备细节。这标明系统依然学会了聚会复杂场景中物体之间的空间关联和相互作用。
极端值得戒备的是系统在处理反射和暗影方面的才智。在一个包含金属球体的场景中,CroBo不仅重建出了球体本人,还准确再现了球体名义的金属反射效果和投射到大地的暗影。这种对光照效果的聚会标明系统掌持了场景中更深层的物理关系,而不单是是浅显的物体识别。
征询团队还测试了CroBo在机器东谈主操作场景中的重建才智。在Franka Kitchen的实验中,当系统不雅察一个包含机器东谈主手臂、厨房器具和各式物品的复杂场景时,即使大部天职容被梗阻,CroBo也能准确重建出机器东谈主手臂的姿态、抓取物体的景色,以及周围物品的精确位置。这种才智关于机器东谈主的精确操作至关遑急,因为它确保了系统大致准确聚会操作环境中的每一个关键要素。
这些重建实验不仅考据了CroBo的时间才智,更遑急的是揭示了系统里面表征的丰富性。通过只是不雅察极少踪迹就能准确重建复杂场景,CroBo说明注解了它照实学会了将"什么是什么"和"什么在何处"这两种信息完好意思交融,酿成了对视觉天下的潜入聚会。这种聚会不是机械的模式匹配,而是信得过的空间语义聚会,为机器东谈主在复杂环境中的智能行径奠定了坚实基础。
五、时候的艺术:CroBo如何感知畅通的诗意
机器东谈主要在动态天下中泛泛使命,不仅需要聚会静态场景中"什么在何处",还必须掌持更高档的才智:聚会"什么向何处畅通"。这就像东谈主类不仅能识别飞行的鸟儿,还能预计它的飞行轨迹一样。为了测试CroBo在这方面的才智,征询团队引入了一个优雅的想法:感知直线性。
感知直线性是一个源于神经科学的想法,它描绘了大脑如何将复杂的视觉变化调整为平滑的内在表征。当咱们不雅察一个东谈主走过房间时,诚然视网膜上的图像变化极其复杂,但咱们的大脑会将这种变化聚会为一条相对平滑的轨迹。这种才智让咱们大致预计畅通物体的将来位置,从而进行准确的交互。
征询团队设计了一个玄机的测试挨次来推测这种才智。他们让CroBo不雅察视频中的一语气帧,然后在系统里面的表征空间中绘画出这些表征点的轨迹。淌若系统信得过聚会了场景中的畅通礼貌,那么这条轨迹应该是相对平滑和线性的,就像在舆图上记号出一条整皆的行进蹊径。相背,淌若系统对畅通的聚会败落不清,轨迹就会呈现出锯齿状的败落模式。
实验末端令东谈主印象潜入。在DAVIS数据集的测试中,CroBo的平均轨迹曲率唯一75.4度,权臣低于对比挨次DINOv2的103.28度。这个数字的含义非常直不雅:CroBo的里面表征轨迹愈加平滑,标明它对畅通的聚会愈加连贯和准确。
为了更直不雅地展示这种互异,征询团队遴荐了一个经典的测试场景:海滩上放风筝的东谈主。在这个视频中,一个东谈主先向右走,然后回身向左走,通盘经过伴跟着相机的跟拍和风筝在空中的舞动。当征询团队将不同系统的里面表征投影到二维空间时,互异立即流露出来。
DINOv2和CropMAE生成的轨迹极其败落,呈现出锯齿状的不章程模式,就像一个喝醉了的东谈主试丹青直线一样扭捏不定。这种败落的轨迹标明这些系统诚然大致识别画面中的内容,但无法聚会其中的畅通逻辑。比拟之下,CroBo生成的轨迹极其优雅,呈现出一条平滑的曲线,准确反应了东谈主物先右后左的畅通模式。
更风趣的是,CroBo的轨迹还自满出与现实畅通的深层对应关系。当东谈主物向右出动时,轨迹在第一主身分方朝上也向右出动;当东谈主物回身向左时,轨迹相同相应地向左舞动。这种对应关系标明系统不仅感知到了畅通的存在,还准确拿获了畅通的标的和节律。
征询团队进一步测试了更复杂的体育场景。在一个旋转雷达天线的视频中,天线进行了五次完整的顺时针旋转。CroBo生成的轨迹呈现出一个绚烂的重叠C形图案,完好意思地反应了这种周期性的旋转畅通。更令东谈主骇怪的是,这个轨迹图案访佛于将圆周畅通投影到二维平面后得到的利萨如曲线,自满了系统对周期性畅通的潜入聚会。
在机器东谈主操作的测试中,CroBo的施展相同出色。在一个机器东谈主掀开微波炉的场景中,机器东谈主手臂先向左出动,收拢微波炉把手,然后掀开门,临了转向水壶。CroBo生成的轨迹阐明地记号出了每个关键当作的转化点,极端是在机器东谈主收拢微波炉把手的霎时,轨迹出现了一个赫然的L形转化。这个转化点恰巧对应着操作中的关键时刻,标明系统大致感知到当作的语义变化。
这些实验末端说明注解,CroBo不仅掌持了静态场景中的"什么在何处",还学会了动态场景中的"什么向何处畅通"。这种对时空关系的深度聚会为机器东谈主在复杂动态环境中的智能行径提供了遑急基础。就像一个优秀的舞者不仅知谈每个姿态的含义,还能感受到当作之间的连贯性和韵律,CroBo为机器东谈主赋予了感知畅通诗意的才智。
六、精确调试:揭示CroBo到手背后的设计忠良
任何到手的时间都离不开悉心的设计遴荐,CroBo也不例外。征询团队通过一系列精密的对比实验,揭示了系统设计中每个关键决策的遑急性,这个经过就像汽车工程师测试每个零部件对整车性能的孝敬一样高超入微。
率先,征询团队考虑了一个根人性问题:是应该让系统学习时候上的对应关系,照旧空间上的对应关系?这个遴荐看似时间性,但现实上反应了对视觉聚会现实的不同聚会。传统挨次持续倾向于时候对应,即让系统学习如何从现时帧预计将来帧。这种挨次的逻辑是:通过聚会时候变化,系统大致掌持动态场景的礼貌。
然而,征询团队的实验末端颠覆了这种直观。当他们比较基于时候对应的"Time"挨次和基于空间对应的"Crop"挨次时,发现后者在所有这个词测试任务中都权臣优于前者。在Franka Kitchen的五个任务中,Crop挨次的平均性能全面超越Time挨次。这个末端标明,学习空间中的"什么在何处"比学习时候中的"什么变成什么"愈加遑急。
这种风光的原因很容易聚会。时候对应靠近着一个根人性的挑战:物体畅通、相机畅通和光照变化会带来普遍的不笃定性。当系统试图从现时帧预计将来帧时,它必须同期处理所有这个词这些复杂变化,这使得学习设计变得依稀不清。比拟之下,空间对应提供了更明确的监督信号:设计区域就完整包含在源区域中,重建任务有明确的尺度谜底。
更风趣的是,当征询团队尝试将时候对应和空间对应团结起来时,性能不但莫得补助,反而下落了。这个"Time+Crop"的组合挨次在所有这个词任务中都施展最差,说明注解了浅显的组合并不行带来上风。征询团队分析合计,这是因为组合挨次让重配置计变得愈加复杂和矛盾:系统既要处理空间定位,又要处理时候变化,两种不同性质的任务相互插手,最终导致学习效果变差。
另一个关键的设计遴荐是梗阻比例。征询团队测试了从75%到95%的不同梗阻比例,末端自满梗阻比例越高,系统性能越好。当梗阻比例从75%补助到90%时,系统在各项任务中的施展都有权臣补助。更顶点的95%梗阻比例带来了最好性能,在所有这个词任务中都达到了最高分数。
这个末端考据了征询团队的中枢假定:唯一当局部踪迹相配稀缺时,系统才会被动充分愚弄全局表征中的信息。淌若保留太多局部踪迹,系统可能会"偷懒",主要依靠这些局部信息进行重建,而不是学习信得过有用的全局聚会。就像学生作念开卷考查时可能不会厚爱挂牵常识点,但闭卷考查却能促进深入学习一样,极高的梗阻比例迫使系统发展出更坚决的场景聚会才智。
征询团队还考据了系统在不同界限下的施展。令东谈主惊喜的是,即使是最小的ViT-S/16架构,CroBo也能取得65.0%的平均到手率,这个收成非凡了好多使用更大架构的传统挨次。当架构界限增多到ViT-B/16和ViT-L/16时,性能进一步补助到70.5%和71.1%,但补助幅度相对谦和。
这个风光说明CroBo的上风主要开首于更好的学习计谋,而不是浅显的策划资源堆叠。系统通过玄机的西席花样学会了更有用的表征,这种表征在不同界限的架构中都能施展作用。这关于现实应器具有遑急意旨,因为它标明即使在策划资源受限的情况下,CroBo也能提供优异的性能。
这些精密的对比实验不仅考据了CroBo设计遴荐的正确性,更遑急的是为将来的征询提供了贵重的设计原则。它们标明,在视觉表征学习中,空间聚会比时候预计更遑急,相配稀缺的局部信息能促进更好的全局聚会,而好的学习计谋比大的模子界限更有价值。这些瞻念察为通盘领域的发展提供了遑急指令。
说到底,CroBo的到手不是随机的,而是拓荒在对视觉聚会现实的潜入瞻念察和悉心设计的时间遴荐之上。韩国国防发展署的这项征询为机器东谈主视觉智能开辟了一条全新谈路,让咱们看到了机器东谈主信得过"看懂"天下的可能性。
当机器东谈主不再只是"看见"物体,而是信得过聚会"什么在何处"时,它们就能像东谈主类一样在复杂果真凿天下中自如地生计和使命。从厨房里的精确操作到复杂环境中的活泼行走,CroBo展现出的不仅是时间上的冲破,更是东谈主工智能向信得过智能迈进的遑急一步。这项征询说明注解了,通过玄机的设计和深入的聚会,咱们照实不错让机器取得接近东谈主类水平的视觉智能。
将来的机器东谈主将不再是那些撞椅子的愚顽家伙,而是大致精确聚会和优雅顶住复杂视觉场景的智能助手。CroBo为咱们描画的这个将来,目前正在变成现实。关于那些但愿深入了解这项冲破性征询的读者,不错通过论文编号arXiv:2603.13904v2查阅完整的时间细节。
Q&A
Q1:CroBo是什么,它和传统机器东谈主视觉系统有什么区别?
A:CroBo是韩国国防发展署开发的机器东谈主视觉聚会系统,它的最大性情是能同期掌持"什么是什么"和"什么在何处"这两种信息。传统系统诚然能识别物体,但持续记不住物体的精确位置关系,就像一个忘记的不雅察者。CroBo通过特殊的西席花样,让机器东谈主不仅能看见物体,还能准确聚会它们在空间中的位置和相互关系。
Q2:CroBo的西席挨次有什么极端之处?
A:CroBo使用了一种访佛"探员游戏"的西席花样。系管辖先完整不雅察一个场景,将信息压缩存储在一个"挂牵瓶颈"中,然背靠近挑战:从场景中剪辑出一小块区域,遮掉其中90%的内容,仅凭剩余10%的踪迹重建被梗阻的部分。这种顶点的西席花样迫使系统必须在挂牵中准确保存"什么物体在什么位置"的完整信息,才能到手完成重建任务。
Q3:CroBo在现实机器东谈主任务中施展如何?
A:CroBo在多项机器东谈主任务中都取得了冲破性效用。在厨房操作任务中,开微波炉门的到手率达到64.8%,比之前最好的挨次补助了13.6%;在畅通扬弃任务中,行走到手率达到80.8%,耸立均衡达到92.0%。更遑急的是,即使使用较小的模子,CroBo也能超越使用更大模子的传统挨次体育游戏app平台,说明其上风开首于更好的聚会才智而非浅显的界限堆叠。